duAro1 Roboter Full safety inkl. Grundprogrammierung für Standardanwendungen

duAro1 Roboter Full safety
Der "duAro" Doppelarm-SCARA-Roboter von Kawasaki Robotics:Ein brandneues Angebot, das das Konzept eines innovativen Doppelarm-SCARA-Roboters verwirklicht.
duAro1
Traglast2 kg (1 Arm)
Achsen4 × 2
Wiederholgenauigkeit±0,05mm
Typische Anwendungen:
- Montage
- Maschinenbeschickung
- Materialhandhabung
- Materialabtrag
- Versiegeln / Dosieren
duAro1 Roboter SPEZIFIKATIONEN
| Typ | Horizontaler Gelenktyp | |||
|---|---|---|---|---|
| Freiheitsgrade (Achsen) | 4 × 2 Arme | |||
| Max. Traglast (kg) | 2 (1 Arm) | |||
| Positionier-Wiederholgenauigkeit (mm) | ±0,05 | |||
| Bewegungsradius (°) | Unterarm | Oberarm | ||
| Armrotation (°) | -170 - +170 (JT1) | -140 - +500 (JT1) | ||
| Armrotation (°) | -140 - +140 (JT2) | -140 - +140 (JT2) | ||
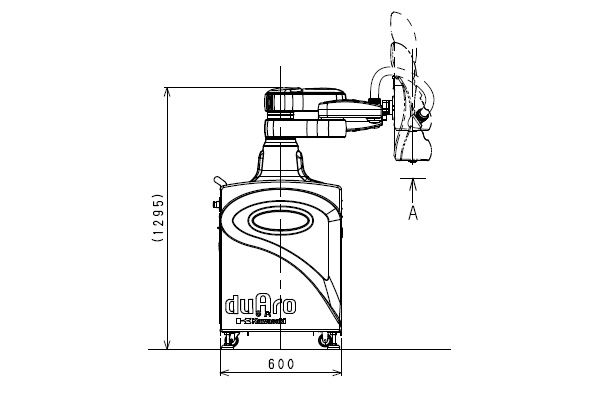
| Arm auf-ab (mm) | 0 - +150 (JT3)*1 | 0 - +150 (JT3)*1 | ||
| Handgelenkdrehung (°) | -360 - +360 (JT4)*1 | -360 - +360 (JT4)*1 | ||
| Steuergerät (D61) | Anzahl kontrollierter Achsen | Max. 12 | ||
| Antriebssystem | Volldigitales Servosystem | |||
| Koordinatensysteme | Gelenk, Basis, Werkzeug | |||
| Arten der Bewegungssteuerung | Gelenk-/Linear-/Kreisinterpolation | |||
| Programmierung | Programmierung, direktes Einlernen | |||
| Speicherkapazität (MB) | 4 | |||
| Allzweck- signale |
Eingänge (Kanäle) | 16 (Max. 32)*2 | ||
| Ausgänge (Kanäle) | 8 (Max. 16)*2 | |||
| Strombedarf | Drehstrom 200-230 V ±10%, 50/60 Hz ±2%, 1 Φ, Max. 2,0 kVA | |||
| Klasse D Erdungsanschluss (Erdungsanschluss speziell für Roboter), Ableitstrom: Maximal 100 mA |
||||
| Gewicht (kg) | 200 | |||
| Installation | Boden | |||
| Umwelt- bedingungen |
Temperatur (°C) | 5 - 40 | ||
| Luftfeuchtigkeit (%) | 35 - 85 (kondensationsfrei) | |||
*1: Spezifikation für den Fall einer serienmäßigen Vertikal- und Rotationsoption, die Spezifikation weicht im Fall anderer Optionen oder einer Umrüstung ab
*2: Option